Cel projektu
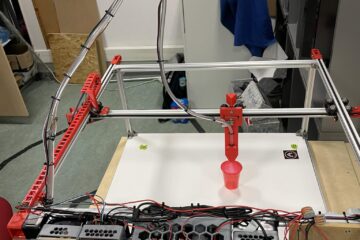
Drawbot to praktyczny projekt mający na celu zaprojektowanie i wykonanie urządzenia zdolnego do odwzorowywania grafik na powierzchni za pomocą precyzyjnego sterowania ruchem. Głównym zamierzeniem było stworzenie makiety systemu rysującego, która w bezpieczny i powtarzalny sposób pozwala prezentować konwersję obrazu na trajektorie ruchu oraz wykonanie ich przez układ mechatroniczny. Projekt powstał z myślą o zastosowaniach edukacyjnych, warsztatowych i prototypowych — jako narzędzie do nauki przetwarzania obrazu, planowania ruchu i integracji oprogramowania z elektroniką sterującą.
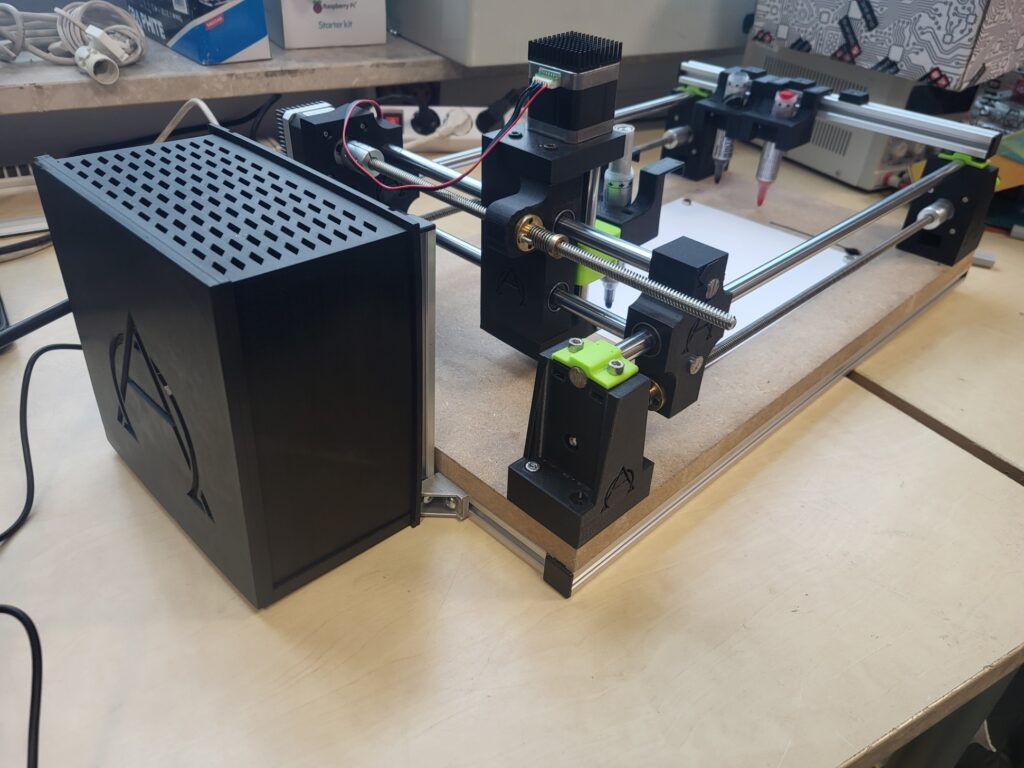
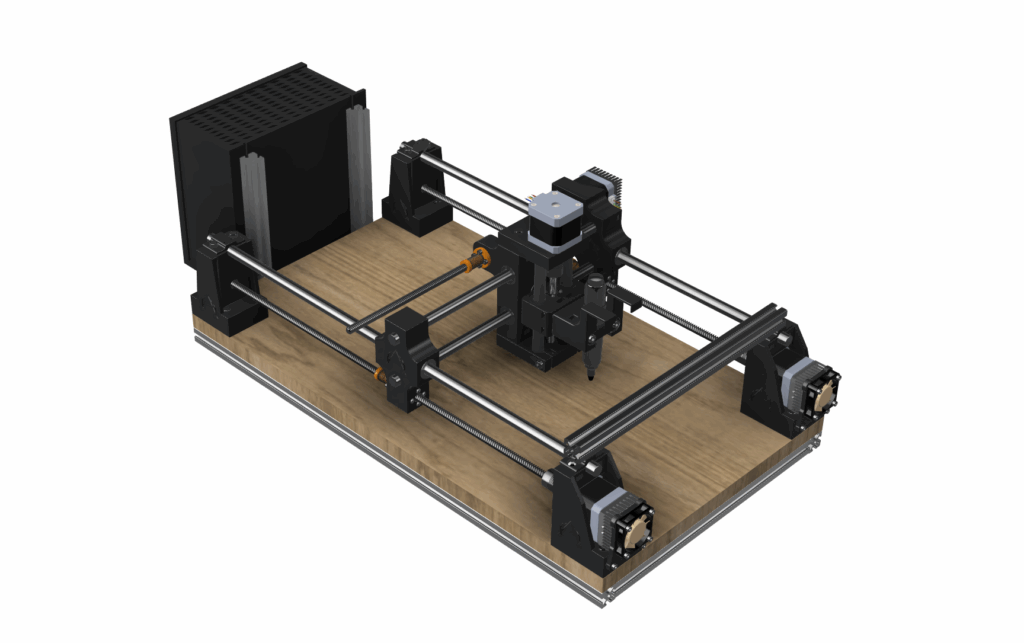
W ramach projektu zaprojektowano:
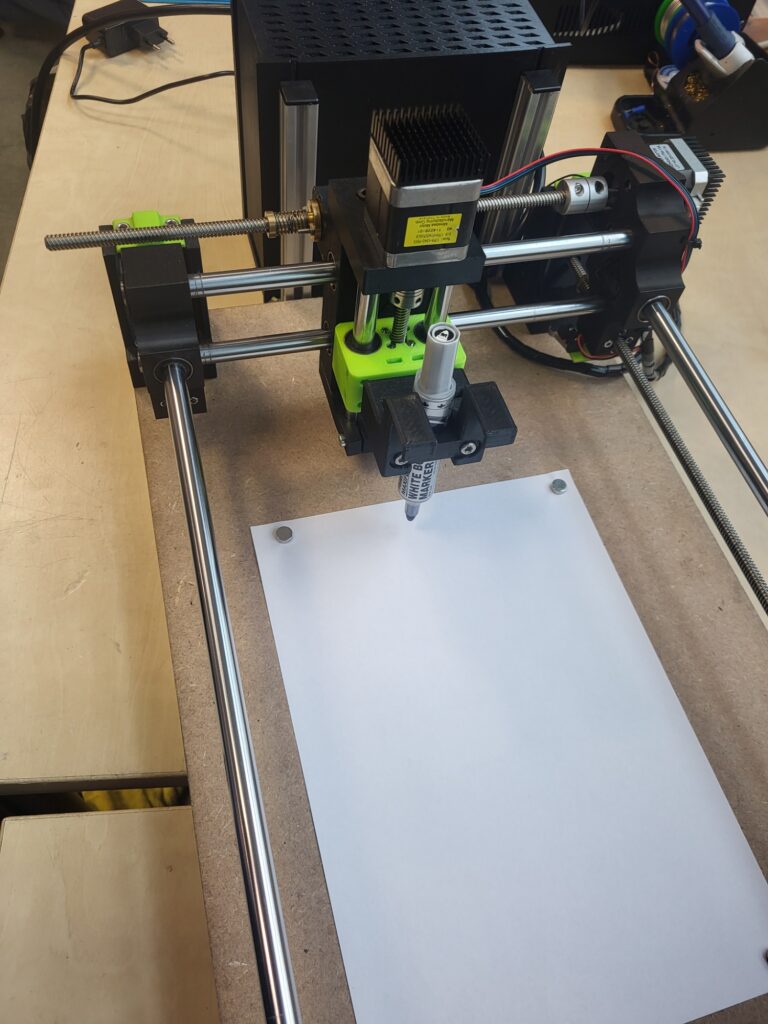
- konstrukcję mechaniczną: lekka rama, mechanika osi X/Y, uchwyt na narzędzie (długopis/marker), prosty mechanizm opuszczania i podnoszenia pisaka,
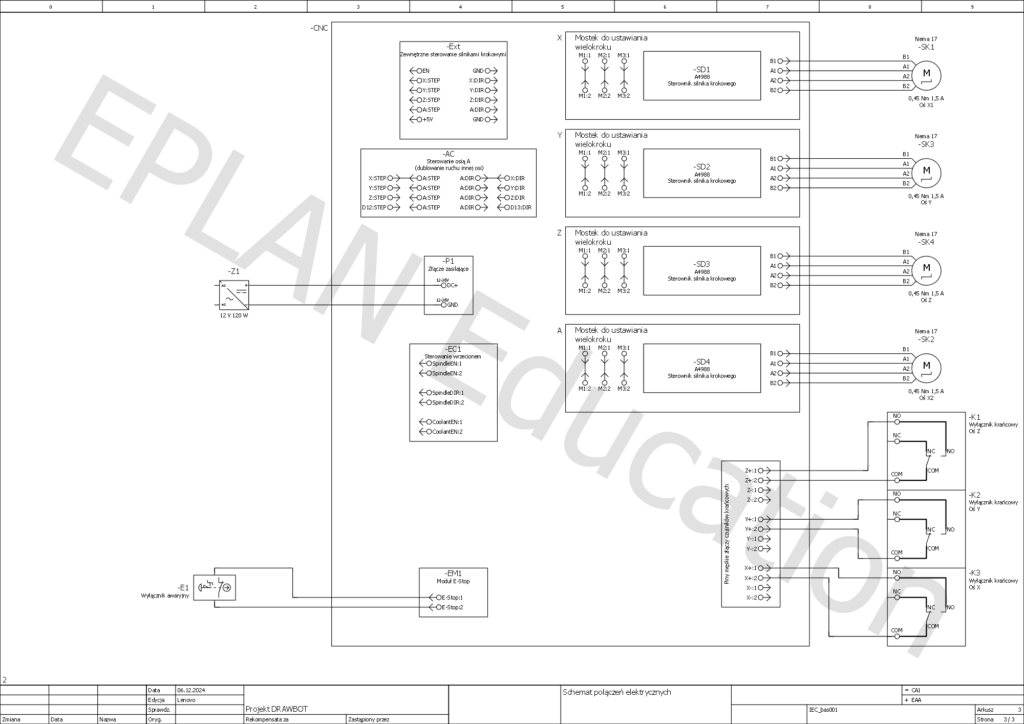
- układ napędowy: silniki krokowe z dedykowanymi sterownikami oraz moduły zasilania i złączami;
- elektronikę sterującą: kontroler odpowiadający za generowanie kroków, obsługę krańcówek i komunikację z systemem sterującym,
- oprogramowanie przetwarzające grafikę: konfiguracja oprogramowania w celu wczytania plików rastrowych (PNG/JPG) i wektorowych (SVG), przeprowadzający wektoryzację oraz oczyszczanie ścieżek,
- interfejs użytkownika: prosty GUI umożliwiający wczytanie grafiki, ustawienie parametrów,
- konwersję do formatu sterownika: eksport ścieżek w popularnym formacie sterowań (G-code) oraz komunikację przez port szeregowy/USB do kontrolera,
- dokumentację i przykładowe pliki graficzne oraz instrukcję uruchomienia.
Techniczne ciekawostki:
1. Wektoryzacja i oczyszczanie ścieżek
W pierwszym etapie obraz rastrowy jest konwertowany do postaci wektorowej — wykrywane są kontury i ścieżki rysunkowe. Następnie przeprowadza się filtrację małych artefaktów, łączenie segmentów i redukcję węzłów, aby uzyskać możliwie płynne i wydajne trasy rysowania.
2. Sterowanie krokowe i bezpieczeństwo mechaniczne
Sterownik wysyła impulsy do sterowników silników krokowych, a system może korzystać z krańcówek i czujników obecności narzędzia, by zapobiec kolizjom.
Jak to działa w praktyce?
Praca z Drawbotem składa się z kilku etapów:
1. Przygotowanie grafiki — użytkownik ładuje obraz lub plik wektorowy i ewentualnie skaluje go do wymiarów obszaru roboczego.
2. Wektoryzacja i czyszczenie — system wykrywa kontury, usuwa szumy i tworzy spójne ścieżki.
3. Wykonanie — po potwierdzeniu plik jest wysyłany do kontrolera, urządzenie wykonuje rysunek przy zachowaniu zadanych ograniczeń.
Wnioski:
Drawbot pokazuje, że integracja przetwarzania obrazu, planowania trajektorii i prostego sterowania mechatronicznego pozwala zrealizować wszechstronne narzędzie dydaktyczne i warsztatowe. Projekt uczy dobrych praktyk inżynierskich: testowania w symulatorze, uwzględniania ograniczeń mechanicznych i projektowania modularnego oprogramowania. Dzięki temu urządzeniu można w praktyczny sposób zaprezentować proces od pomysłu graficznego do jego fizycznego wykonania.

0 komentarzy