ROBOT DELTA
W świecie robotyki istnieje szczególny typ manipulatorów, który swoją formą oraz dynamiką bardziej przypomina zwinnego pająka niż klasyczne, sztywne ramię przemysłowe. Mowa o robocie typu Delta- konstrukcji zaprojektowanej z myślą o realizacji zadań wymagających wyjątkowej szybkości i wysokiej precyzji. Celem niniejszego projektu było zaprojektowanie oraz wykonanie robota tego typu.
Czym właściwie jest robot Delta?
Robot Delta to manipulator o strukturze równoległej, w którym trzy niezależne ramiona łączą nieruchomą podstawę z efektem końcowym. W przeciwieństwie do robotów szeregowych, wszystkie napędy umieszczone są w korpusie, co redukuje masę elementów ruchomych i bezwładność układu. Dzięki zamkniętej pętli kinematycznej maszyna osiąga ekstremalne przyspieszenia i precyzję, co czyni ją bezkonkurencyjną w zadaniach typu pick-and-place w osiach X, Y, Z. Świetnie sprawdza się do zadań typu sortowanie czy przekładanie.
BUDOWA ROBOTA
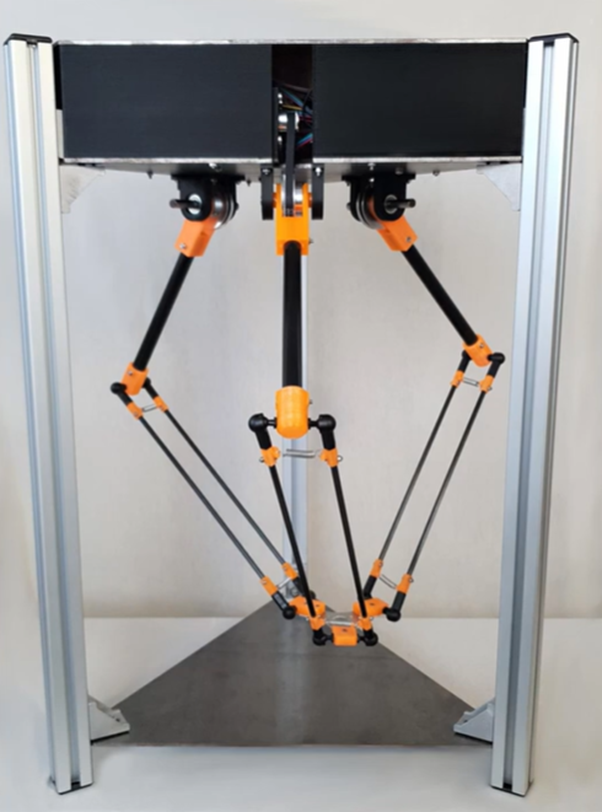
Konstrukcja robota została zaprojektowana z myślą o prostocie oraz niskiej masie elementów ruchomych. Za sterowanie całym układem odpowiada mikrokontroler Arduino Uno, który realizuje algorytmy sterowania oraz koordynuje pracę wszystkich podzespołów. Układ napędowy opiera się na trzech silnikach krokowych, zamontowanych w nieruchomej podstawie. Każdy z nich odpowiada za ruch jednego z ramion robota, umożliwiając precyzyjne pozycjonowanie efektora końcowego w przestrzeni roboczej. Ramiona robota zostały wykonane jako lekkie konstrukcje, co pozwala ograniczyć bezwładność układu i zwiększyć jego dynamikę. Znaczna część elementów mechanicznych została wytworzona przy użyciu technologii druku 3D.
Na końcu układu kinematycznego znajduje się chwytak, którego działanie opiera się na serwonapędzie. Mechanizm ten umożliwia precyzyjne chwytanie i przenoszenie niewielkich obiektów— w tym przypadku kulek. Dodatkowo robot został wyposażony w moduł komunikacji bezprzewodowej Bluetooth, który umożliwia wymianę danych z komputerem. Za jego pośrednictwem przesyłane są informacje o aktualnym położeniu silników krokowych.
Aplikacja sterująca
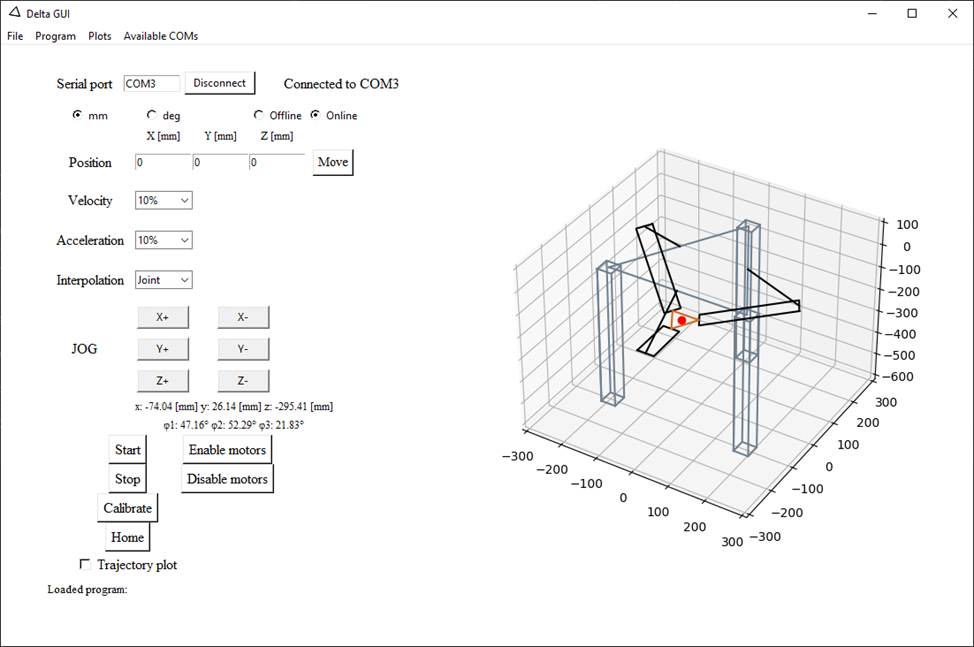
Integralną częścią systemu jest aplikacja napisana w języku Python, która umożliwia zarówno sterowanie robotem, jak i analizę jego pracy. Program oferuje wizualizację kinematyki w czasie rzeczywistym, dzięki czemu użytkownik może na bieżąco obserwować ruch efektora oraz położenie poszczególnych ramion.
Aplikacja wyposażona jest również w tryb offline, pozwalający na symulację działania robota bez konieczności fizycznego połączenia z urządzeniem. Umożliwia to testowanie trajektorii, weryfikację poprawności programów oraz analizę ruchu w bezpiecznym środowisku wirtualnym. Komunikacja z robotem odbywa się za pomocą modułu Bluetooth, co zapewnia wygodne, bezprzewodowe sterowanie oraz przesyłanie danych pomiędzy robotem a komputerem.
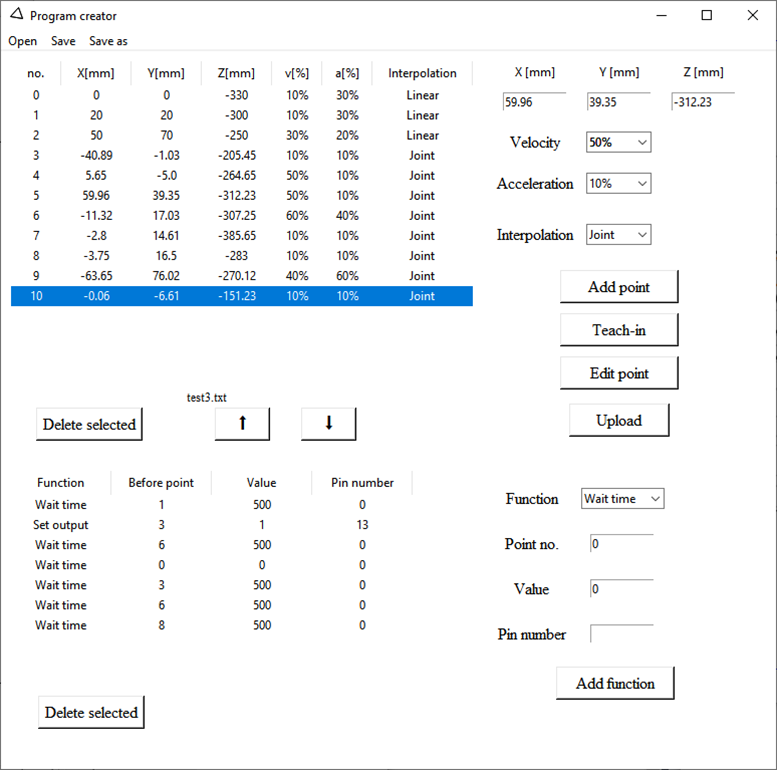
Użytkownik ma możliwość programowania ruchu robota na dwa sposoby:
- metodą teach-in, polegającą na ręcznym ustawianiu kolejnych pozycji robota i zapisywaniu ich w systemie,
- poprzez bezpośrednie wprowadzanie współrzędnych przestrzennych (x, y, z), co umożliwia precyzyjne i świadome planowanie trajektorii ruchu.
Zapraszamy do zapoznania się z filmikiem przedstawiającym proces budowy robota lub dokumentacji.



0 komentarzy